IT/모바일
김용승 메이커의 대형 로봇 제작기!
[메이키 제작기 #03] 부위별 작업하기
※ 매주 수요일, 금요일 1회씩 연재됩니다.
※ 이 제작기의 내용은 김용승 메이커가 직접 작성한 것으로
저자와 협의되지 않은 무단전재, 수정 및 배포를 금합니다.
# 1회 - 11월 11일 금요일 [메이키 제작기 #01]
# 2회 - 11월 16일 수요일 [메이키 제작기 #02]
# 3회 - 11월 18일 금요일 [메이키 제작기 #03]
# 4회 - 11월 23일 수요일 [메이키 제작기 #04]
# 5회 - 11월 25일 금요일 [메이키 제작기 #05]
# 번외 - 11월 30일 수요일 [Interview 김용승 메이커에게 묻다!]
몸통 모터 연결 작업
다리의 뼈대가 어느 정도 갖춰졌으니, 몸통에 모터를 연결할 차례가 되었다. 나는 우선 몸통 하단에 사용할 판재를 재단한 뒤 다리 위에 올려 놓았다. 자작 스러스트 볼 베어링의 안정성을 확인하기 위한 것이었다. 우선 몸통용 합판을 얹은 다음 그 위에 정민정 작가에게 올라가 달라고 요청했다. 그 결과 성인의 몸무게를 버틸 만큼 안정적이고 회전도 잘 된다는 것을 확인했다.
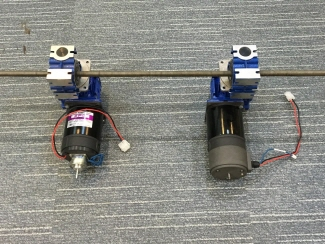
몸통용 모터를 장착하기 위해 기어박스와 모터를 올려놓고 위치를 잡아 주었다. 참고로 메이키에 사용한 모터와 기어박스는 협찬을 받은 것이었다. 사용된 모터의 사양은 DC 24V, 40W, 1250 rpm, 토크가 3kgf/cm이다. 기어박스의 경우 기어비가 각각 1/10, 1/30인 두 개의 기어박스를 연결하여 기어비를 1/300으로 만들어서 회전수가 4.16rpm 정도로 천천히 회전하게 만들었다.
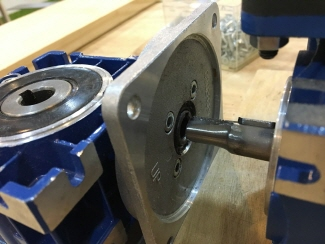
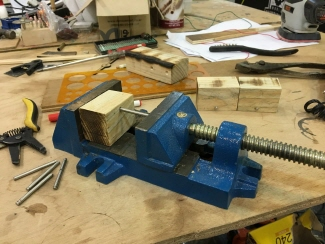
기어박스 출력 축의 지름은 14mm이고 모터와 연결되는 입력 축의 지름은 12mm인데 기어박스의 출력을 다른 기어박스의 입력에 넣어주기 위해서 14mm 축의 한쪽 끝을 12mm로 가공해야 연결이 가능했다. 축 모양 또한 가공해야 했다. 기어박스의 입력 홀에는 들어간 홈이 나 있는데(키홈이라고 불림) 축에는 튀어 나온 부분(키라고 불림)이 있어서 딱 맞게 끼워져야 회전 힘이 전달되기 때문이었다. 나는 작업실에서 목공 작업을 주로 해 왔기 때문에 금속 가공용 공구가 없어서 그냥 목공용 디스크 샌더기로 가공을 시도해 봤다. 결과는 성공적이었고 매끈하게 가공이 잘 되었다. 모터와 직결된 기어박스와 추가 기어박스의 높이 단차를 해결하기 위해 자투리 합판을 뒤적거려 적당한 높이를 찾아 깔아서 높이를 맞추었다.


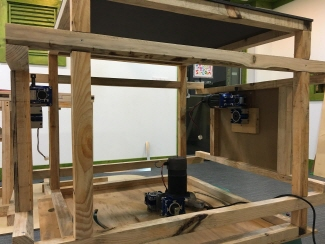
△ 브리지와 리테이너 위에 몸통용 합판을 얹은 모습. 몸통 바닥판에 정민정 작가가 테스트를 해 보고 있다. 올라가서 좌우로 흔들흔들 춤을 추어도 될 만큼 튼튼하다.


△ 목공작업용 디스크 샌더기로 축 가공 모습

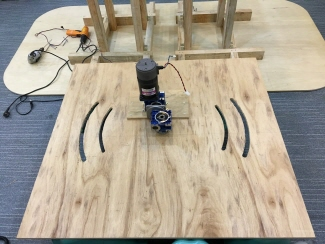
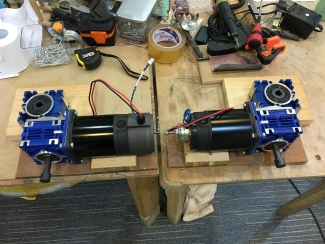
△ 몸통 회전용 모터를 몸통하단에 장착한 모습
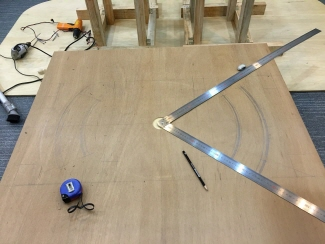
몸통의 하단에는 회전 제한용 구멍과 전선이 통과할 구멍이 필요했다. 따라서 리테이너 작업을 할 때와 마찬가지로 호 형태로 구멍을 뚫어주었다. 전선이 통과할 구멍은 오른쪽만 필요한데, 필요 없더라도 대칭이 낫겠다 싶어서 좌우 동일하게 뚫었더니 와이파이 모양으로 완성이 되었다.
쓸모 없어진 작업 2
브릿지와 다리는 브릿지의 각 귀퉁이에 한 개의 스크류를 박아서 고정했다. 총 4개의 스크류만 풀면 분해가 되도록 만들었는데, 당시 무슨 생각에서인지 몸통에서 브릿지와 다리를 분리할 수 있도록 몸통 하단에 나사 위치 위에 홀쏘로 구멍을 뚫었었다.
그런데 분해할 때 확인하니 먼저 몸통을 들어내고 그 다음에 브릿지와 다리를 분리하면 되므로 구멍을 통해서 나사를 풀거나 쪼일 일이 없었다는 것을 깨달았다. 쓸모 없는 작업을 하고 만 셈이었다.


회로 보드 납땜 작업
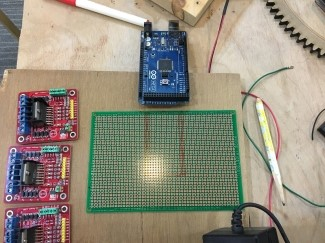
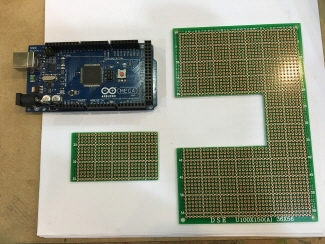
메이키의 컨트롤러로는 아두이노 메가 보드를 사용했다. 6개의 DC 모터를 제어하는 데 필요한 핀 12~18개와 더불어 머리, 팔, 몸통 몸통의 위치 감지 센서에 필요한 핀 12개, 그리고 외부 컨트롤러용 통신 핀 2개 까지 모두 합치면 총 26~32개의 핀이 필요하다. 이를 모두 제어하려면 아두이노 메가 보드가 제격이었다.
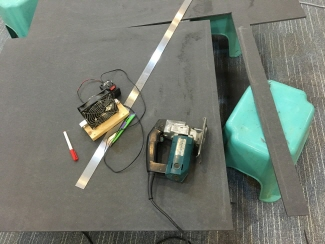
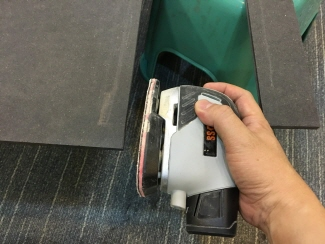
모터 드라이버는 L298N을 사용했다. 모터는 24V 40W이고, 모터 드라이버는 2A까지 가능하므로 충분할 것이다. 모터 드라이버당 2개의 모터가 제어 가능 하므로 드라이버 보드는 3개 장착한다. 이 작업에 앞서 모터 제어선과 센서의 입력 단자를 위해 아두이노 위에 끼우는 쉴드 형태의 만능기판을 만들어야 했다. 나는 만능기판이 아두이노 보드를 가리는 것을 좋아하지 않아서 아두이노가 보이게끔 만능기판을 뚫어서 만들기로 했다. 만능기판의 절단에는 다이아몬드날을 끼운 미니 조각기를 사용했다. 만능기판을 절단한 다음 모터의 출력과 센서의 입력이 용이한 부분을 골라 터미널 블록을 배치한 후 점퍼선으로 아두이노에 연결했다. 한쪽 구석에는 눈의 LED를 제어할 드라이버칩을 장착했는데, 여기에는 LED용 드라이버 칩으로 TA8428K를 사용했다. 또한 나중에 눈이 좌우로 교차해서 깜빡거리는 연출을 할 수 있도록 각각의 눈에 드라이버칩을 따로 사용했다.

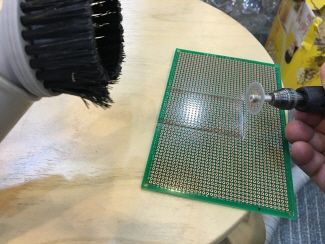
△ 미니조각기에 다이아몬드 날을 장착하여 보드를 절단했다.
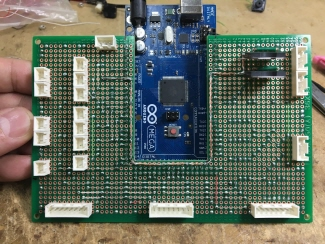

△ 쉴드 형태로 만능기판을 제작하고 터미널을 붙인 후 점퍼선으로 연결했다. 아래쪽은 모터용 터미널, 왼쪽은 센서용 터미널, 오른쪽 상단은 LED용 터미널, 오른쪽 하단은 외부 테스트 컨트롤러용 터미널이다.
또한 외부 테스트 컨트롤러도 별도로 만들었는데, 이는 메이키와 약간 떨어진 곳에서 메이키를 보면서 작동 테스트를 하기 위함이었다. 외부 컨트롤러용 터미널은 4핀을 사용하는데, VCC, TX, RX, GND로 전원 공급단자를 넣어서 테스트 컨트롤러에 전원을 공급하게 된다. 이 터미널 핀의 조합으로 블루투스 또는 다른 무선통신용 보드를 장착할 수 있게 개조하는 것도 가능하다.
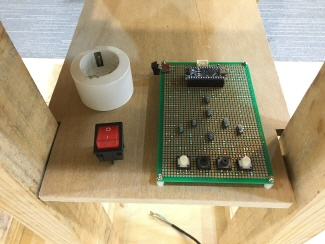
외부 테스트 컨트롤러로는 아두이노 나노를 사용하였다. 화살표 모양으로 배치된 슬라이드 타입의 스위치는 위에서 부터 눈, 머리, 팔, 손, 몸통을 지정하는 것이고, 아랫쪽 푸쉬버튼 스위치는 왼쪽 부터 모터 회전 왼쪽 방향(또는 상향)동작, 자동동작, 멈춤, 모터 회전 오른쪽 방향(또는 하향)동작을 하는 버튼이다. 외부 테스트 컨트롤러는 오른쪽 다리 상부에 넣어 놓고 있다가 필요하면 꺼내 쓸 수 있도록 할 것이다. 외부 테스트 컨트롤러의 위치가 정해졌는데 외부와 연결되는 주전원선의 연결도 외부 테스트 컨트롤러와 같은 위치에 있으면 좋을거 같아 옆에다 배치하였다.

△ 외부 테스트 컨트롤러
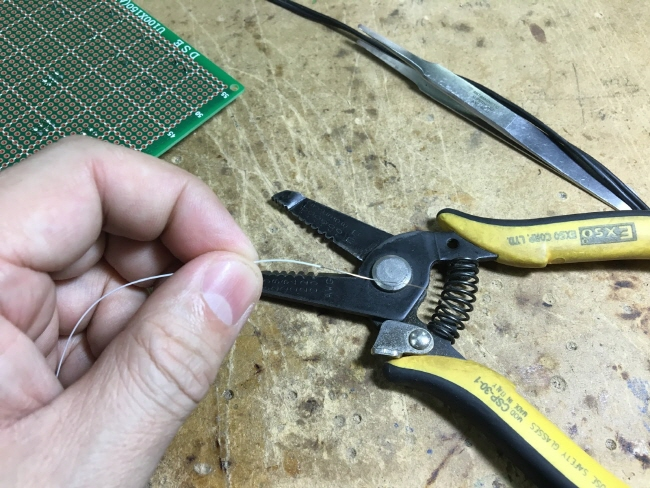
△ 초핑 와이어는 스트리퍼로 피복을 벗긴다.
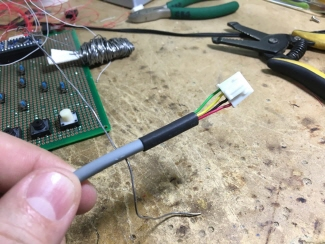
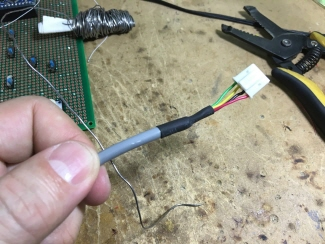
△ 수축튜브에 열을 가하면 수축하면서 단단해진다. 그러면 전선 피복 말단이 깔끔하면서도 단단하게 고정된다.
△ 외부 테스트 컨트롤러와 주 전원선의 접점을 오른쪽 윗다리 부분에 배치했다.
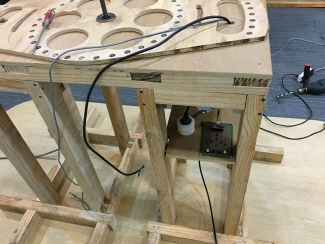
그런 다음 합판 위에 컨트롤러 보드와 드라이버 보드, SMPS 파워 그리고 멀티탭을 배치하고 고정시켰다. 몸통 뒤에는 오토마타 작품을 넣을 것이기 때문에 컨트롤러 보드는 몸통의 앞에 고정시켰다.


△ 몸통의 앞쪽에 컨트롤 보드 배치
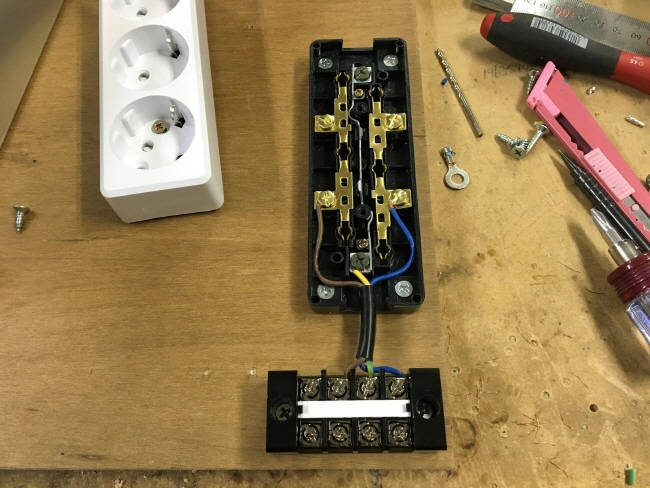
△ 오른쪽 다리 상단에서 올라오는 전원선을 연결하기 위해 터미널 블록을 사용했다.
몸통 뼈대 작업
스크롤 쏘로 미리 절단해 둔 각목을 뼈대로 사용했다. 스크롤 쏘 특유의 큰 소음 때문에 주변 이웃에 민폐를 끼치지 않기 위해서는 빠른 시간 안에 작업해야 하는 부담감이 있었다. 일단 대충 크게 자른 다음 정확하게 치수를 재고, 밴드쏘를 사용해 남는 부분을 잘라낸 다음 디스크 샌더기를 사용해서 마무리를 하는 동시에 정확한 치수를 맞추었다.


그리고 몸통 하단에 뼈대 나무를 배치하고 고정한다. 이 과정에서 가장 중요한 것은 수직과 수평을 맞추는 일이다. 위치를 대강 잡고 클램프로 단단히 고정한 다음 고무 망치나 손으로 살살 때려서 정확한 치수를 맞추면 된다. 그런 다음 드릴을 사용해서 나사못을 박을 구멍을 미리 뚫어주면 되는데, 이 과정에서 흔들릴 수 있으므로 클램프로 고정해두는 것이 좋다.
이렇게 몸통 하단 뼈대를 고정한 뒤에는 몸통 상단 뼈대를 고정할 차례다. 몸통 상단 뼈대를 하단 뼈대 위에 올려 놓고 치수를 맞춘다. 나는 상단 뼈대를 하단 뼈대에 맞춘 후 직각 클램프로 고정한 다음, 그것을 그대로 들어 몸통 상판에 올려 고정했다. 그리고 몸통 하단 뼈대에 수직 뼈대를 세운 뒤 직각 클램프를 사용해 임시로 고정했다. 그다음 상판을 올리고 직각 수직 수평이 맞는지 꼼꼼하게 확인한 뒤에 나사로 단단히 고정했다.


△ 클램프로 하판 뼈대 고정 모습. 클램프로 고정한 뼈대에 구멍을 뚫는다.


△ 왼쪽은 몸통 하단 뼈대와 몸통 상단 뼈대를 겹친 모습이고, 오른쪽은 몸통 수직 뼈대를 세운 모습이다.

△ 수직뼈대에 상판을 올려 놓고 고정한다.
몸통용 하판은 보이지 않는 부분이고 몸통의 하중을 지탱해야 하기 때문에 20mm 합판을 사용했지만 상판은 보이는 부분이고 머리만 지탱하면 되기 때문에 외장용 자재로 사용하기로 한 고밀도 MDF를 사용했다. 우선 치수를 기입해서 그린 후 직소를 사용해서 절단했다. 직소로 직선을 자르는 것은 꽤 숙련을 요하는 작업이다. 천천히 급하지 않게 자르면 나름 꽤 괜찮은 직선을 얻을 수 있다. 만약 너무 마음에 들지 않게 삐뚫어지게 잘리면 핸드샌딩기로 튀어나온 부분을 갈아내어 직선을 만들면 된다.
△ 고밀도 MDF를 직소로 절단시 칼날에 다른 물체가 닿지 않도록 낮은 의자를 사용해서 바닥에서 띄웠다.
만일 메이키 몸통이 직사각육면체였다면 각 꼭지점을 연결해 몸통 뼈대는 상판용 4개, 몸통용 4개, 하판용 4개(총 12개)만으로도 충분했을 것이다. 그러나 메이키 몸통의 모서리는 둥근 형태이므로, 둥근 형태(기술적으로 R(Round)라고 부름)가 시작하는 부분에 뼈대를 추가로 배치해야 둥근 부분을 덮는 외피를 고정할 수 있었다. 결국 몸통 뼈대는 앞면과 뒷면에 가로 뼈대를 아래 위로 대서 우물정자 모양(⋕)이 되었고, 위에 4개, 아래에 4개의 뼈대를 추가로 사용했다. 결국 몸통 뼈대는 총 20개를 사용했다. 참고로 앞면, 뒷면의 가로 뼈대는 홈을 내어서 끼우는 형태로 제작하였다.


△ 우물 정자 모양 (⋕)의 가로 뼈대와 앞면 뒷면의 뼈대를 연결한 옆면 뼈대의 모습
몸통의 모터 축 연결 작업
양팔과 머리에 사용할 모터 축은 몸통 모터축을 가공할 때와 동일한 방법으로 가공했다. 한 가지 확인한 사실은, 같은 일을 반복적으로 하면 처음 할 때보다 요령이 생겨서 시간이 줄어든다는 것이었다. 세 개를 한번에 만들어도 처음 한 개를 만들 때보다 시간이 적게 걸렸다.
몸통 옆에 달릴 팔 고정용 축에는 14mm x 1000mm 짜리 나사봉을 사용했다. 나사봉을 사용할 때의 장점은, 몸통에 팔을 끼워 넣은후 나사봉에 나사를 끼워 넣고 스패너로 조이면 팔이 빠지지 않도록 고정할 수 있고 또한 센서용 캠을 넣고 고정 하기도 용이하다는 점이다. 단점이라면 나사봉의 직경이, 14mm인 기어박스 홀의 직경보다 약간 작아서 헐렁거릴 수 있다는 점이다.
센서 팔 모터를 고정하는 부분은 팔의 무게가 꽤 무거울 것으로 예상했기 때문에, 몸통을 고정할 때와 동일한 방법을 사용했다. 팔 모터를 고정할 판은 옆면의 위아래 가로축 사이에 끼워 넣었으며, 합판을 이용해서 제작했다. 만약 이 판 없이 외장용 고밀도 MDF에 직접 모터를 고정했다면 팔을 달 때 문제가 있었을 것이다.
몸통은 크고 무거워서 운반을 용이하도록 반을 자를 것이다. 자를 부분을 미리 표시했다.


△ 모터 연결 축의 가공
△ 판에 팔 모터를 고정하는 작업

△ 강도를 보강 하기 위해 옆면 판을 만들고 거기에 모터를 고정함


△ 팔 모터를 고정하고 팔용 나사봉을 끼워본 모습(왼쪽)과 몸통을 반으로 자를 부분을 표시한 모습(오른쪽)
팔 모터 축 작업
팔을 몸통에 끼우는 축으로 사용할 나사봉은 용접을 하여 제작하였다. 디스크 절단기를 사용하여 1m의 나사봉을 절반으로 잘랐다. 그 결과 50cm짜리 나사봉 두 개가 완성되었고, 그중 하나를 또 절반으로 잘라서 25cm짜리 나사봉 2개를 만들었다. 그리고 다시 25cm짜리 나사봉을 절반으로 잘라서어 12.5cm 2개를 만들었다. 결과적으로 1m의 나사봉이 50cm 1개, 25cm 1개, 12.5cm 2개로 나누어 진 셈이었다. 그런 다음 25cm 나사봉을 50cm 나사봉의 끝에 수직으로 붙여 T자 모양으로 만들고 12.5cm 나사봉을 사선으로 덧대 강도를 보강했다. 그 결과 새들이 앉는 횟대 같은 모양이 만들어졌다. 그리고 키 역할을 할 수 있게 나사봉 중간에 용접봉을 녹여 붙였다.
몸통의 수직 뼈대를 반으로 자른 후 고정하기 위해 5cm x 15cm 금속판 두 장을 ‘ㄱ’자로 붙였다.
사실 용접 작업은 이번에 메이키를 제작하면서 처음 해 본 것이었다. 다행히도 친척집에 용접기가 있어서 무료로 사용할 수 있었다. 다만, 용접이 쉬울 거라고 생각한 것이 오산이었다. 팔용 모터 축 2개와 몸통 고정용 브라켓 4개를 만드는데 용접봉 2개 반이 들었고 작업 시간만 한 시간이 넘는 만만치 않은 작업이었다.
초보였던 게 티가 났던 것일까. 작업할때는 몰랐는데 자고 일어나니 다리와 팔 일부가 화끈거렸다. 용접 불꽃에 화상을 입었던 것이다. 한 여름 해수욕장에서 자외선 차단제를 안 바르고 하루 종일 놀았을 때 피부가 탄 것 같은 증상이었다. 이 일로 일주일 정도 고생을 하였다. 용접할 때는 소매나 바짓단이 긴 옷을 입는 것이 좋다는 사실을 이번 일을 통해서 배웠다.


△ 용접의 나쁜 예: 이렇게 작업하면 화상 입음, 긴옷을 입어 피부를 가릴 것!
다행히 용접 화상이 작업을 중단할 성격의 일은 아니라서 계속 작업을 진행하였다.
계획은 용접봉을 나사봉에 녹여 붙여서 키를 만드는 것인데 용접이 쉬운 게 아니라서 용접비드(bead)를 길게 만들고 싶었지만 모양새는 그리 깔끔하지 못했다. 하지만 제대로 붙여진 용접점 하나는 1톤까지도 견딘다고 하니 모양은 이래도 제대로 된 역할을 해내겠다 싶어서 재작업 없이 핸드 디스크 그라인더로 키 홀 높이와 너비에 맞게 용접점을 가공했다.


△깔끔하지 못한 상태로 만들어진 용접점. 결국 그라인더로 용접점을 가공해야 했다.


△ 용접점 가공 후 모습이다.
머리 모터 작업
머리용 모터의 결합도 앞선 방법과 다르지 않다. 합판에 기어박스를 결합하고 단차를 없앨 합판을 모터 밑에 덧대어 제작했다.


△ 몸통에 들어가는 모터 4개를 부착한 모습
머리 받침대 작업
머리로 사용할 1000mm x 5T아크릴 반구의 고정을 위해 직경 1000mm짜리 원형 판을 제작했다.
원형 판을 제작하는 방법은 이렇다. 먼저 500mm가 약간 넘는 길다란 막대기를 준비한다. 막대기 끝부분에 펜으로 작게 표시를 하고 길이 500mm 지점에 또다른 표시를 한다음 표시부분들을 드릴로 구멍을 뚫어 놓는다. 그리고 막대기를 판재위에 올려놓는데 구멍중 하나를 판재의 중심에 놓는다. 중심에 놓은 구멍에 드릴을 넣고 판재에 구멍을 뚫는다. 드릴은 빼지 않고 그대로 놓는다. 그러면 드릴을 중심으로 막대기가 회전하는 상태가 된다. 다른 구멍에 연필을 넣고 돌려 밑선을 그린다. 그러면 동그란 원이 그려진다. 막대기와 드릴을 뺴고 선을 따라 직쏘로 잘라내면 원형판이 완성 된다.

△ 직쏘를 사용해서 원형으로 잘라내는 모습
원형 머리 받침대의 아래쪽에는 베어링을 배치하여 머리가 원활하게 회전할 수 있도록 했다. 나는 여기에서 머리 받침대와 몸통 사이의 간격이 46mm 정도로 띄웠는데, 이때 나무토막을 높이 44mm로 가공하였다. 그런 다음 나무토막에서 베어링이 2mm가 나오도록 하는 임시 지그를 만든 다음 그것을 댄 상태에서 구멍을 뚫어서 완성했다. 그다음 다이아몬드 휠날을 끼운 미니 조각기로 6mm 환봉을 자른 다음 E링을 끼울 홈을 양끝에 내고, 바이스로 압착하여 가공이 끝난 환봉을 나무 조각에 끼웠다. 그리고 마지막으로 와셔, 베어링을 넣고 E링을 끼우면 베어링이 완성된다. 이 과정을 거쳐 10개의 베어링 뭉치를 완성했다. 나는 이것을 머리 받침대의 아랫면에 원형으로 배치하여 고정했다.


△ 2mm짜리 금속판 2개로 임시 지그를 만들어서 균일한 높이의 구멍을 뚫었다.

△ 미니 조각기로 환봉을 절단한 다음, 바이스를 사용해 나무토막에 끼워 넣고 있는 모습


△ 완성된 베어링 뭉치를 머리 받침대 아랫면에 원형으로 배치하고 고정했다.
머리 역할을 할 아크릴 반구는 테가 바깥쪽으로 나와 있는 형태라 보기가 싫으므로 제거했다. 그런 다음 아크릴반구를 받침대에 고정할 차례가 되었는데, 이 부분이 조금 어려웠다. 반구의 안쪽에는 받침대와 고정할 수 있는 부분이 마땅치 않았다.
나는 고민 끝에 나무토막을 아크릴 반구의 안쪽에 붙이고 이 나무토막을 받침대와 붙이는 방법을 사용하기로 했다. 나무토막을 반구 안쪽의 둥근 부분과 일치하도록 샌더기로 가공을 한 다음 순간접착제를 사용해서 안쪽에 붙였다. 위치를 잡은 뒤 받침대 밑에서 드릴로 구멍을 뚫고 나사를 박아서 고정했다. 마지막 연결에 나사를 사용했으니 언제든 머리를 열 수 있을 것이다.
이렇게 해서 받침대와 아크릴 반구의 고정 작업이 끝났다. 그런 다음 나는 아크릴 반구의 테두리를 갂아 냈다. 드릴 프레스로 구멍을 뚫고 직쏘를 고정한 뒤 뒤집었다. 큰살은 직쏘로 잘라내고 다듬는 것은 디스크 샌더기로 갈아내는 방식을 사용했다.


△ 아크릴 반구 고정용 나무를 아크릴 반구에 붙인 모습


△ 아크릴 반구의 테두리를 깍아내는 모습
눈알 작업
테두리까지 다듬고 나니 본격적으로 머리 작업을 할 수 있게 되었다. 이제는 눈알을 작업할 차례였다.
내가 계산한 결과, 머리의 크기가 1000mm일때 눈알의 직경은 270mm였다. 400mm 반구 하나로 270mm짜리 눈알 2개를 만들 수 있었다. 나는 우선 400mm짜리 아크릴 반구의 절반을 마스킹 테이프로 표시한 다음, 펜과 핸드드릴로 자작 컴퍼스를 대충 만들어 직경 270mm의 원을 표시했다. 그리고 다이아몬드 휠날을 끼운 미니 조각기로 잘라냈다. 이것이 눈알이 되어 줄 것이다. 절단면이 매끄럽도록 사포로 잘 다듬은 다음 흐르는 물에 씻어 가공중 생긴 먼지를 제거하고 잘 말렸다.
그런 다음 머리에 눈이 달릴 높이와 눈의 직경을 고려해 마스킹 테이프로 위치를 표시하고, 미리 잘라둔 눈알의 뒷면에 양면 테이프를 붙여서 눈알을 임시로 부착 했다. 왼쪽 눈알 하나를 달고 난 뒤 눈 사이의 거리를 표시해서 오른쪽 눈이 달릴 지점을 표시한 뒤 눈알을 붙일 자리에 마스킹 테입을 붙였다. 오른쪽 눈알도 임시로 부착한 뒤 눈알의 테두리를 따라 칼로 금을 긋고 테이프를 떼어 냈다.
굳이 눈을 붙일 자리에 마스킹 테이프를 붙여 작업한 것이 복잡해 보일 수도 있겠다. 설명을 덧붙이자면, 이유는 머리에 페인트를 칠할 때 눈 부분은 투명한 색으로 남겨두기 위함이다. 그래야만 안쪽에 설치한 LED의 빛이 통과 가능하기 때문이다.


△ 400mm 아크릴 반구에 270mm 원을 표시

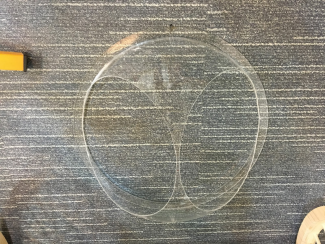
△ 눈을 따낸다. 눈모양을 따내고 남은 반구의 모양이 곤충의 머리처럼 생겼다.
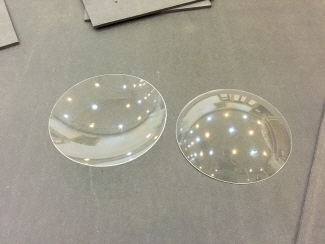

△ 눈알 가공이 끝난 모습, 머리에 붙일 위치를 맞추기 위해 마스킹테입을 붙인다.


△ 눈을 임시로 붙인 뒤, 칼로 마스킹테입에 금을 그어 필요 없는 부분은 떼어낸다.
눈 LED작업
눈이 반짝반짝 빛나게 하기 위해 전등용으로 나온 22cm짜리 LED보드를 구매했다. 직접 만들 수도 있었지만, 브레드보드가 없어서도 아니며, LED가 없어서도 아니다. 단지 시간이 없었을 뿐이다. 납땜 작업이 은근히 시간이 걸리는 작업이었다. 메이커 페어가 어느덧 눈앞에 성큼 다가오니 마음이 좀 급해졌던 탓도 있다.


△ 구매한 직경 22cm LED 등과 제작한 LED등 받침대
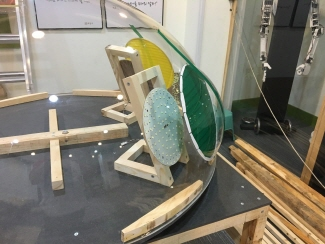

△ 임시로 맞춰 본 LED등
《3회 끝 / 다음 회에서 계속됩니다.》
※ 글: 김용승 메이커
※ 편집: 홍혜은 에디터
이전 글 : [메이키 제작기 #02] 본격적인 작업 시작!
![[메이키 제작기 #프롤로그] 김용승 메이커의 대형 로봇 제작 도전기!](/data/cms/CMS1113394015_thumb.jpg)
![[메이키 제작기 #01] 제작 의뢰부터 기획까지](/data/cms/CMS8150258172_thumb.jpg)
![[메이키 제작기 #02] 본격적인 작업 시작!](/data/cms/CMS8447043015_thumb.jpg)
최신 콘텐츠